- Courses
- Tutorials
- Interview Prep
GATE EC|| CONTROL SYSTEM || BLOCK REDUCTION METHOD/ SFG|| PYQS(2000-2025)
Question 1
Despite the presence of negative feedback, control systems still have problems of instability because the
(GATE 2005 || EC || MCQ ||1 MARK)
Components used have nonlinearities
Dynamic equations of the systems are not known exactly
Mathematical analysis involves approximations
System has large negative phase angle at high frequencies
Question 2
Negative feedback in a closed-loop control system DOES NOT
( GATE 2015 || EC || MCQ ||1 MARK)
reduce the overall gain
reduce bandwidth
improve disturbance rejection
reduce sensitivity to parameter variation
Question 3
The transfer function Y(s)/R(s) of the system shown is
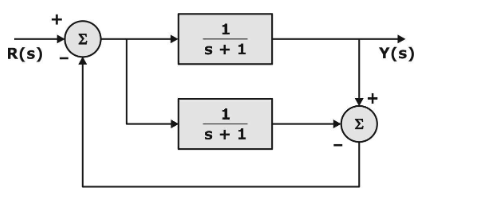
(GATE 2010 || EC || MCQ ||1 MARK)
0
[Tex]\frac{1}{s + 1}[/Tex]
[Tex]\frac{2}{s + 1}[/Tex]
[Tex]\frac{2}{s + 3}[/Tex]
Question 4
For the following system,
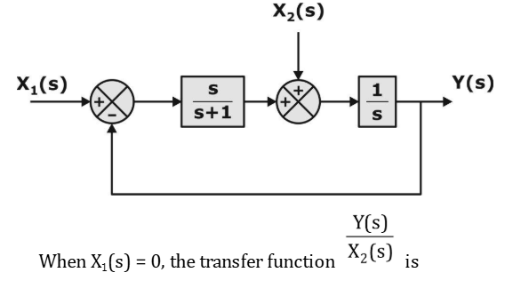
(GATE 2014 || EC || MCQ ||1 MARK)
[Tex]\frac{s + 1}{s^2}[/Tex]
[Tex]\frac{1}{s + 1}[/Tex]
[Tex]\frac{s + 2}{s(s + 1)}[/Tex]
[Tex]\frac{s + 1}{s(s + 2)}[/Tex]
Question 5
By performing cascading and/or summing differencing operations using transfer function block [Tex]G_1(s)[/Tex] and [Tex]G_2(s)[/Tex], one CANNOT realize a transfer function of the form
(GATE 2015 || EC || MCQ ||2 MARK)
[Tex]G_1(s)G_2(s)[/Tex]
[Tex]\frac{G_1(s)}{G_2(s)}[/Tex]
[Tex]G_1(s) \left( \frac{1}{G_1(s)} + G_2(s) \right)[/Tex]
[Tex]G_1(s) \left( \frac{1}{G_1(s)} - G_2(s) \right)[/Tex]
Question 6
The block diagram of a feedback control system is shown in the figure. The overall closed-loop gain G of the system is
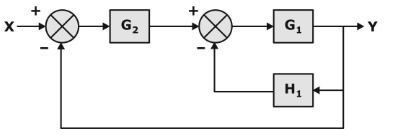
(GATE 2016 || EC || MCQ ||1 MARK)
[Tex]G = \frac{G_1 G_2}{1 + G_1 H_1}[/Tex]
[Tex]G = \frac{G_1 G_2}{1 + G_1 G_2 + G_1 H_1}[/Tex]
[Tex]G = \frac{G_1 G_2}{1 + G_1 G_2 H_1}[/Tex][Tex]G = \frac{G_1 G_2}{1 + G_1 G_2 + G_1 G_2 H_1}[/Tex]
Question 7
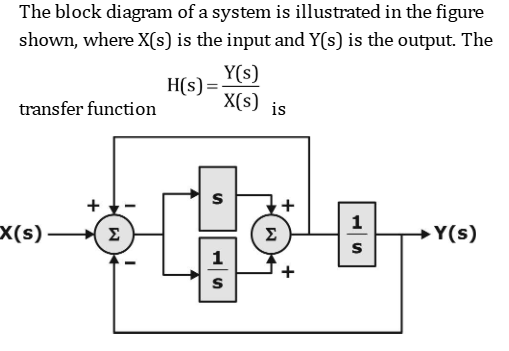
(| GATE 2019 || EC || MCQ ||2 MARK)
[Tex]H(s) = \frac{s^2 + 1}{2s^2 + 1}[/Tex]
[Tex]H(s) = \frac{s^2 + 1}{s^3 + 2s^2 + s + 1}[/Tex][Tex]H(s) = \frac{s + 1}{s^2 + s + 1}[/Tex]
[Tex]\frac{Y(s)}{X_2(s)} = \frac{\frac{1}{s}}{1 + \frac{1}{s} \cdot \frac{s}{s+1}} = \frac{s+1}{s(s+2)}[/Tex]
Question 8
The block diagram of a feedback control system is shown in the figure.
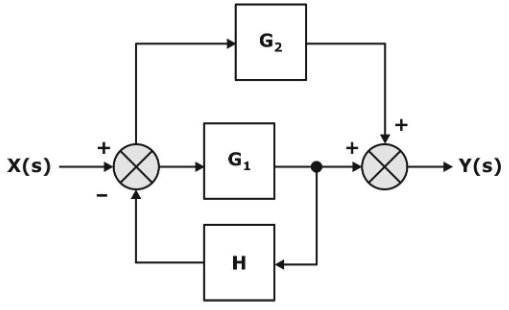
The transfer function ![]() of the system is
of the system is
[Tex]\frac{G_1 + G_2}{1 + G_1 H}[/Tex]
[Tex]\frac{G_1 + G_2 + G_1 G_2 H}{1 + G_1 H}[/Tex]
[Tex]G_1(s) \left( \frac{1}{G_1(s)} + G_2(s) \right)[/Tex]
[Tex]G_1(s) \left( \frac{1}{G_1(s)} + G_2(s) \right)[/Tex]
Question 9

(GATE 2003 || EC || MCQ ||2 MARK)
[Tex]\frac{6}{s^2 + 29s + 6}[/Tex][Tex]\frac{6s}{s^2 + 29s + 6}[/Tex]
[Tex]\frac{s(s+2)}{s^{2} + 29s + 6}[/Tex]
[Tex]\frac{s(s+27)}{s^{2} + 29s + 6}[/Tex]
Question 10
The signal flow graph for a system is given below. The transfer function Y(s) / X(s)
for this system is
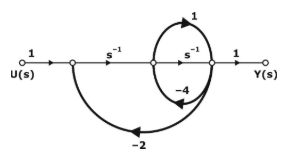
(GATE 2013 || EC || MCQ ||1 MARK)
[Tex]\frac{s+1}{5s^{2} + 6s + 2}[/Tex]
[Tex]\frac{s + 1}{s^{2} + 6s + 2}[/Tex]
[Tex]\frac{s+1}{s^{2}+4s+2}[/Tex][Tex]\frac{1}{5s^{2} + 6s + 2}[/Tex]
There are 11 questions to complete.