- Courses
- Tutorials
- Interview Prep
GATE EC|| CONTROL SYSTEM || COMPENSATOR|| PYQS(2000-2025)
Question 1
Which of the following statements is incorrect?
(GATE 2017 || EC || MCQ ||1 MARK)
Lead compensator is used to reduce the settling time.
Lag compensator is used to reduce the steady-state error.
Lead compensator may increase the order of a system.
Lag compensator always stabilize an unstable system.
Question 2
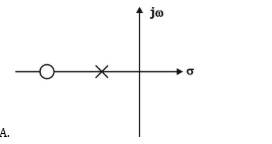
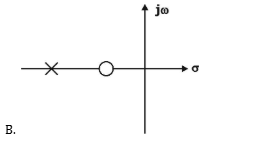
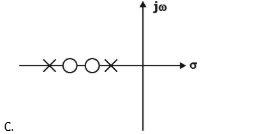
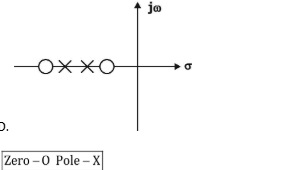
Which of the following can be the pole-zero configuration of a phase-lag controller (lag compensator)?
( GATE 2017 || EC || MCQ ||1 MARK)
Question 3
For the following feedback system [Tex]G(s) = \frac{1}{(s+1)(s+2)}. [/Tex] The 2% settling time of the step response is required to be less than 2 seconds.
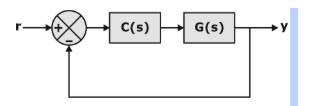
Which one of the following compensators C(s) achieves this?
(GATE 2014 || EC || MCQ ||2 MARK)
[Tex]3\left(\frac{1}{s+5}\right) [/Tex]
[Tex]5\left(\frac{0.03}{s}+1\right) [/Tex]
[Tex]2(s+4)[/Tex]
[Tex]4\left(\frac{s+8}{s+3}\right) [/Tex]
Question 4
The transfer function of a compensator is given as:
[Tex]G_{\text{c}}(s) = \frac{s + a}{s + b} [/Tex]
The phase of the above lead compensator is maximum at
( GATE 2012 || EC || MCQ ||2 MARK)
[Tex]\sqrt{2} \text{ rad/s} [/Tex]
[Tex]\sqrt{3} \text{ rad/s} [/Tex]
[Tex]\sqrt{6} \text{ rad/s} [/Tex]
[Tex]\frac{1}{\sqrt{3}} \text{ rad/s} [/Tex]
Question 5
The transfer function of a compensator is given as:
[Tex]G_{\text{c}}(s) = \frac{s + a}{s + b} [/Tex]
[Tex]G_{\text{c}}(s)[/Tex] is a lead compensator if
( GATE 2012 || EC || MCQ ||2 MARK)
a = 1, b = 2
a = 3, b = 2
a = –3, b = –1
a = 3, b = 1
Question 6
The magnitude plot of a rational transfer function G(s) with real coefficients is shown below. Which of the following compensators has such a magnitude plot?
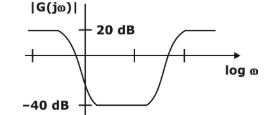
( GATE 2009 || EC || MCQ ||1 MARK)
Lead compensator
Lag compensator
PID controller
Lead-Lag compensator
Question 7
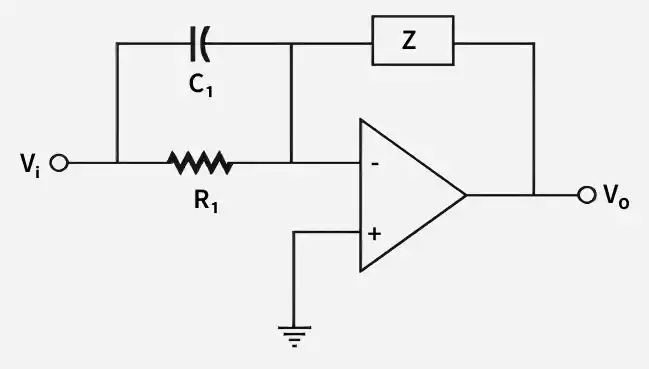
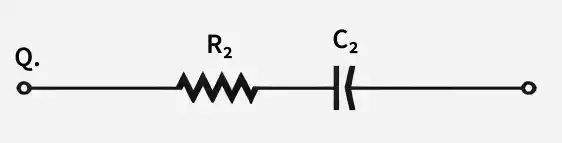
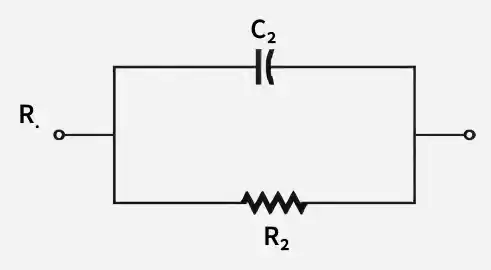
Group I gives two possible choices for the impedance Z in the diagram. The circuit elements in Z satisfy the condition R2C2 > R1C1. The transfer function
represents a kind of controller. Match the impedances in Group I with the types of controllers in Group II.
(GATE 2008 || EC || MCQ ||2 MARK)
Group I
ff
Group II
1. PID Controller
2. Lead Compensator
3. Lag Compensator
Q – 1, R – 2
Q – 1, R – 3
Q – 2, R – 3
Q – 3, R – 2
Question 8
The open-loop transfer function of a plant is given as [Tex]G(s) = \frac{1}{s^2 - 1} [/Tex] . If the plant is operated in a unity feedback configuration, then the lead compensator that can stabilize this control is
(GATE 2007 || EC || MCQ ||2 MARK)
[Tex]\frac{10(s-1)}{(s+2)} [/Tex]
[Tex]\frac{10(s+4)}{(s+2)} [/Tex]
[Tex]\frac{10(s+4)}{(s+1)} [/Tex]
[Tex]\frac{10(s+2)}{(s+10)} [/Tex]
Question 9
The transfer function of a phase-lead compensator is given by
[Tex]G_{\text{c}}(s) = \frac{1 + 3Ts}{1 + Ts} [/Tex] where T > 0
The maximum phase-shift provided by such a compensator is:
[Tex]\frac{\pi}{2} [/Tex]
[Tex]\frac{\pi}{3} [/Tex]
[Tex]\frac{\pi}{4} [/Tex]
[Tex]\frac{\pi}{6} [/Tex]
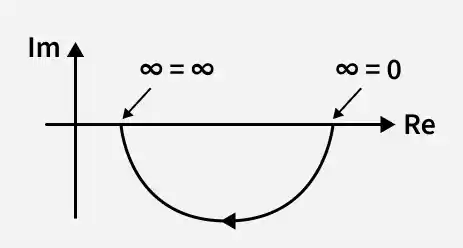
Question 10
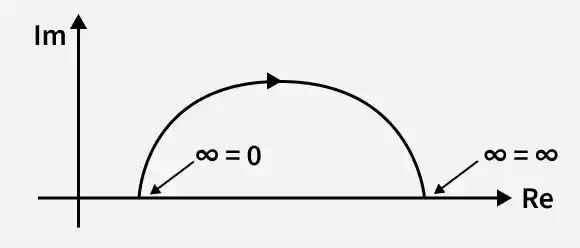
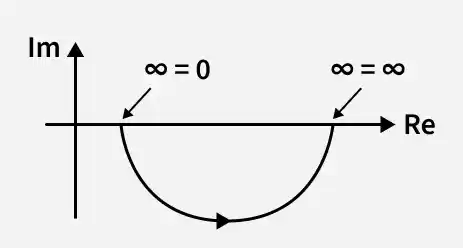
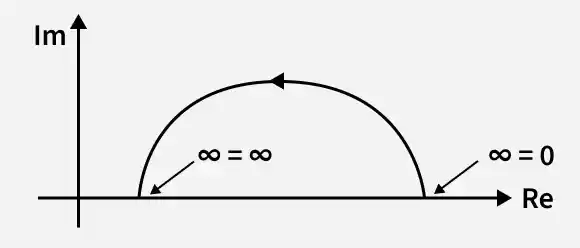
Which one of the following polar diagrams corresponds to a lag network?
(GATE 2005 || EC || MCQ ||2 MARK)
There are 12 questions to complete.