- Courses
- Tutorials
- Interview Prep
GATE EC || CONTROL SYSTEM|| TIME DOMAIN ANALYSIS & CONTROLLER|| PYQS(2000-2025)
Question 1
The frequency response of a linear, time-invariant system is given by
[Tex]H(f) = \frac{5}{1 + j 10 \pi f}[/Tex]
The step response of the system is
(GATE 2007 || EC || MCQ||1 MARK)
[Tex]H(f) = \frac{5}{1 + j 10 \pi f}[/Tex]
[Tex]5(1 - e^{-t/5}) u(t)[/Tex]
[Tex]\frac{1}{5} (1 - e^{-5t}) u(t)[/Tex]
[Tex]\frac{1}{5} (1 - e^{-t/5}) u(t)[/Tex]
Question 2
Consider an even polynomial p(s)p(s) given by
[Tex]p(s) = s^4 + 5s^2 + 4 + K[/Tex],
where K is an unknown real parameter. The complete range of K for which p(s) has all its roots on the imaginary axis is
[Tex]-4 \le K \le \frac{9}{4}[/Tex]
[Tex]-3 \le K \le \frac{9}{2}[/Tex]
[Tex]-6 \le K \le \frac{5}{4}[/Tex]
[Tex]-5 \le K \le 0[/Tex]
Question 3
Two linear time-invariant systems have the following transfer functions:
[Tex]G_1(s) = \frac{10}{s^2 + s + 1}[/Tex]
[Tex]G_2(s) = \frac{10}{s^2 + \sqrt{10}s + 10}[/Tex]
Unit step input is applied to both systems. The corresponding unit step responses are represented as [Tex]y_1(t) \text{ and } y_2(t)[/Tex] , respectively.
Determine which of the following statements is/are true.
( GATE 2022 || EC || MCQ ||2 MARK)
[Tex]y_1(t) \text{ and } y_2(t)[/Tex] have the same percentage peak overshoot.
[Tex]y_1(t) \text{ and } y_2(t)[/Tex] have the same steady-state value.
[Tex]y_1(t) \text{ and } y_2(t)[/Tex] have the same damped frequency of oscillation.
[Tex]y_1(t) \text{ and } y_2(t)[/Tex] have the same 2% settling time.
Question 4
The block diagram of a closed-loop control system is shown in the figure. R(s),Y(s) and D(s) are the Laplace transforms of the time-domain signals r(t),y(t) and d(t)
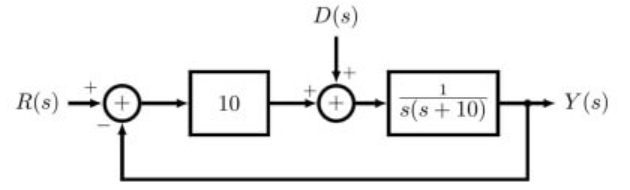
, respectively. Let the error signal be defined as [Tex]e(t) = r(t) - y(t)[/Tex]. Assuming the reference input [Tex]r(t) = 0[/Tex] for all t, the steady-state error [Tex]e(\infty)[/Tex], due to a unit step disturbance d(t), is _________ (rounded off to two decimal places).
( GATE 2022 || EC || NAT ||2 MARK)
0
Question 5
A closed loop system is shown in the figure where k>0 and α>0 .The steady state error due to a ramp input (R(s)=α/s2)is given by
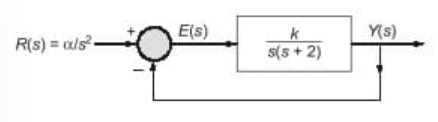
( GATE 2023 || EC || MCQ ||2 MARK)
[Tex]\frac{2\alpha}{k}[/Tex]
[Tex]\frac{\alpha}{k}[/Tex]
[Tex]\frac{\alpha}{2k}[/Tex]
[Tex]\frac{\alpha}{4k}[/Tex]
Question 6
In the feedback control system shown in the figure below [Tex]G(s) = \frac{6}{s(s + 1)(s + 2)}[/Tex].
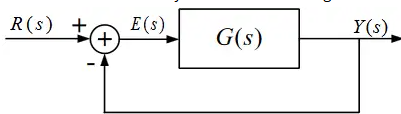
R(s),Y(s), and E(s) are the Laplace transforms of r(t),y(t) and e(t), respectively. If the input r(t) is a unit step function, then
( GATE 2024 || EC || MCQ ||2 MARK)
limt→∞e(t)=0
limt→∞e(t)=1/3
limt→∞e(t)=1/4
limt→∞e(t) does not exist, e(t) is oscillatory
Question 7
A satellite attitude control system, as shown below, has a plant with a transfer function [Tex]G(s) = \frac{1}{s^2}[/Tex] cascaded with a compensator [Tex]C(s) = \frac{K(s + \alpha)}{s + 4}[/Tex], where K and α are positive real constants.
In order for the closed-loop system to have poles at [Tex]-1 \pm j3[/Tex], the value of αα must be
( GATE 2024 || EC || MCQ ||2 MARK)
0
1
2
3
Question 8
A PD controller is used to compensate a system. Compared to the uncompensated system, the compensated system has
( GATE 2003 || EC || MCQ ||1 MARK
a higher type number
reduced damping
higher noise amplification
larger transient overshoot
Question 9
A unity negative feedback closed-loop system has a plant with the transfer function [Tex]G(s) = \frac{1}{s^2 + 2s + 2}[/Tex] and a controller Gc(s) in the feedforward path. For a unit step input, the transfer function of the controller that gives the minimum steady-state error is
( GATE 2010 || EC || MCQ ||2 MARK)
[Tex]G_c(s) = \frac{s + 1}{s + 2}[/Tex]
[Tex]G_c(s) = \frac{s + 2}{s + 1}[/Tex]
[Tex]G_c(s) = \frac{(s + 1)(s + 4)}{(s + 2)(s + 3)}[/Tex]
[Tex]G_c(s) = 1 + \frac{2}{s} + 3s[/Tex]
Question 10
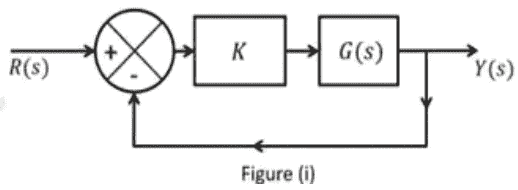
The open-loop transfer function of a dc motor is given as [Tex]\frac{\omega(s)}{V_a(s)} = \frac{10}{1 + 10s}[/Tex] When connected in feedback as shown below, the approximate value of Ka that will reduce the time constant of the closed loop system by one hundred times as compared to that of the open-loop system is
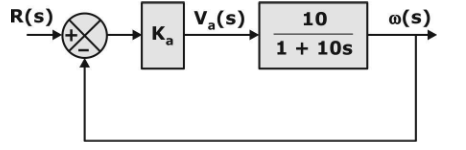
(GATE 2013 || EC || MCQ ||2 MARK)
1
5
10
100
There are 22 questions to complete.