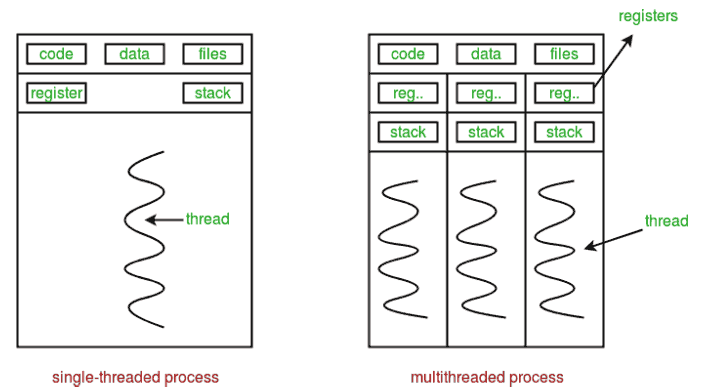
A thread is a single sequence stream within a process. Because threads have some of the properties of processes, they are sometimes called lightweight processes. But unlike processes, threads are not independent from each other unlike processes. They share with other threads their code section, data section and OS resources like open files and signals. But, like processes, a thread has its own program counter (PC), a register set, and a stack space.
Multithreading is a programming technique where a process is divided into multiple smaller units called threads, which can run simultaneously. Multithreading is commonly used in applications like web servers, games, and real-time systems to handle simultaneous tasks like user input, background processing, and other I/O operations simultaneously.
Multithreading in C
In C programming language, we use the POSIX Threads (pthreads) library to implement multithreading, which provides different components along with thread management functions that create the foundation of a multithreaded program in C.
The pthread library is defined inside <pthread.h> header file. Generally, we don’t need to explicity specify to the linker that we are using this library but it the program shows error, then compile it with the following flags:
C
gcc sourceFile.c -lpthread
Let’s see how to perform multithreading in our C program.
Creating a Thread
The first step is to create a thread and give it a task. To create a new thread, we use the pthread_create() function provided by the thread library in C. It initializes and starts the thread to run the given function (which specifies its task).
Syntax
C
pthread_create(thread, attr, routine, arg);
where,
- thread : Pointer to a pthread_t variable where the system stores the ID of the new thread.
- attr : Pointer to a thread attributes object that defines thread properties. Use NULL for default attributes.
- routine: Pointer to the function that the thread will execute. It must return void* and accept a void* argument.
- arg: A single argument passed to the thread function. Use NULL if no argument is needed. You can pass a struct or pointer to pass multiple values.
Example
C
#include <pthread.h>
#include <stdio.h>
void* foo(void* arg) {
printf("Created a new thread");
return NULL;
}
int main() {
// Create a pthread_t variable to store
// thread ID
pthread_t thread1;
// Creating a new thread.
pthread_create(&thread1, NULL, foo, NULL);
return 0;
}
Output
Created a new thread
In the above program, there is a possibility that the main thread may end before the execution of the created thread thread1 and it may lead to unexpected behaviour of the program. So, there is a functionality in C to wait for the execution of the particular thread.
Wait for Thread to Finish
pthread_join() function allows one thread to wait for the termination of another thread. It is used to synchronize the execution of threads.
Example
C
#include <pthread.h>
#include <stdio.h>
void* foo(void* arg) {
printf("Thread is running.\n");
return NULL;
}
int main() {
pthread_t thread1;
pthread_create(&thread1, NULL, foo, NULL);
// Wait for thread to finish
pthread_join(thread1, NULL);
return 0;
}
Output
Thread is running
Explicitly Terminate Thread
pthread_exit() function allows a thread to terminate its execution explicitly. pthread_exit() is called when a thread needs to terminate its execution and optionally return a value to threads that are waiting for it.
Example
C
//Driver Code Starts{
#include <pthread.h>
#include <stdio.h>
//Driver Code Ends }
void* foo(void* arg) {
printf("Thread is running.
");
// Explicity terminate thread
pthread_exit(NULL);
//Driver Code Starts{
printf("This will not be executed.
");
return NULL;
}
int main() {
pthread_t thread;
pthread_create(&thread, NULL, foo, NULL);
// Wait for created thread to finish
pthread_join(thread, NULL);
return 0;
}
//Driver Code Ends }
Output
Thread is running.
Requests Cancellation of Thread
The pthread_cancel() function is used to request the cancellation of a thread. It sends a cancellation request to the target thread, but the actual termination depends on whether the thread is in a cancellable state and if it handles cancellation.
Example
C
//Driver Code Starts{
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
void* myThreadFunc(void* arg) {
while(1) {
printf("Thread is running...
");
sleep(1);
}
return NULL;
}
//Driver Code Ends }
int main() {
pthread_t thread;
pthread_create(&thread, NULL, myThreadFunc, NULL);
sleep(5);
//Requesting to cancel the thread after 5 seconds.
pthread_cancel(thread);
// Wait for the thread to terminate
pthread_join(thread, NULL);
//Driver Code Starts{
printf("Main thread finished.
");
return 0;
}
//Driver Code Ends }
Output
Thread is running...
Thread is running...
Thread is running...
Thread is running...
Thread is running...
Thread is running...
Main thread finished.
Getting ID of a Thread
pthread_self() function returns the thread ID of the calling thread. This is useful when you need to identify or store the ID of the current thread in multi-threaded programs.
Example
C
#include <pthread.h>
#include <stdio.h>
void* foo(void* arg) {
// Get current thread ID
pthread_t thisThread = pthread_self();
printf("Current thread ID: %lu\n",
(unsigned long)thisThread);
return NULL;
}
int main() {
pthread_t thread1;
pthread_create(&thread1, NULL, foo, NULL);
pthread_join(thread1, NULL);
return 0;
}
Output
Current thread ID: 134681321096896
Common Issues in Multithreading
Multithreading can greatly improve the performance of the program by running multiple tasks simultaneously. But it also comes with several threading issues and challenges that need to be handled properly to ensure efficient running of a multithreaded program Some of the common issues in multithreading in c are as follows:
Race Conditions
The race condition issue occurs when multiple threads try to access a shared resource at the same time and the output depends on the order of the execution of those threads. This issue can lead to unpredictable behavior of the program and cause the program to generate different results each time when it is executed.
Example: If two threads try to acess a shared counter variable where both are trying to change the vale based on the current value, then the program may not generate the expected result because both threads may read and write the counter at the same time.
Deadlocks
A deadlock condition arises when multiple threads are blocked forever as they are waiting for each other to release the occupied resource. It generally arises in situations where thread acquire some resources initially and request for more resources midway during their execution. Which leads to a cycle of dependencies.
Example: Thread A has occupied Resource 1 and 2 arewaiting for resource 3 while thread B has occupied resource 3 and is waiting for resource 2 for its completion.
Starvation
The starvation condition arises when a thread is denied access for the requested resource for indefinite amount of time. This situation commonly occurs with priority-based scheduling algorithms when they are biased toward certain threads.
Example: A thread with low priority will have to wait indefinitely as higher priority threads are continuously available.
Thread Synchronization
Thread synchronization is a process that is used to ensure that multiple threads can work with shared resources without causing any issues like race conditions, deadlocks, or data corruption. Thread synchronisation techniques control how threads interact or modify shared data or resources and also ensures that certain critical sections of code are executed in a controlled manner.
Mutex-Based Synchronization
A mutex is the most basic synchronization mechanism. It ensures that only one thread can access a shared resource at a time, preventing race conditions.
Semaphores
A semaphore is a signaling mechanism that controls access to a shared resource using a counter. It can be either a binary semaphore (with values 0 or 1) or a counting semaphore (with values greater than 1), allowing multiple threads to access a resource concurrently up to a specified limit.
Conditional Variables
Condition variables allow threads to wait for certain conditions to be met before proceeding. A condition variable is always used along with a mutex lock. A thread will wait on the condition variable and release the mutex until it is notified by another thread.
Barrier Synchronization
Threads can be synchronized at specific points in execution using a barrier. Barriers are synchronization mechanisms that block threads until all threads in a group reach a specific point in their execution. Once all threads reach the barrier, they are allowed to proceed.
Read-write Locks
Read-Write locks allow multiple threads to read from a shared resource or data at the same time but ensure that only one thread can write to the resource at a time. This improves performance when the number of readers is more than writers.
Need for Multithreading
Multithreading is used to improve a program’s efficiency by allowing it to perform multiple tasks in parallel. It enhances CPU utilization, reduces idle time, and makes applications faster and more responsive, especially in tasks like file handling, user interaction, and background processing.
For example, in a browser, multiple tabs can be different threads. MS Word uses multiple threads: one thread to format the text, another thread to process inputs, etc.
Advantages of Multithreading
- Improved Performance: Multithreading enables programs to perform multiple tasks simultaneously by running multiple threads concurrently which can improve the performance and speed up the execution of programs.
- Better CPU Utilisation: Multithreading also improves CPU utilisation as multiple threads run concurrently on different cores of CPU ensuring that all cores are put to work which help in reducing CPU idling thus utilising the complete potential of the CPU.
- Responsiveness and Improved User Experience: Multithreading also enhances the responsiveness of the program as different threads can handle different tasks making the program more responsive and faster.
- Efficient Resource Sharing: Compared to separate processes threads can easily share data as they share the same memory space. Which reduces the time required for interposes communication and makes information sharing faster.
- Scalability: Applications that use multithreading are easier to scale as workloads can be easily divided among different threads. Also, a greater number of cores can be added to further handle larger workloads.
Limitations of Multithreading
- Complexity in Programming: Using Multithreading increases the complexity of the program as developers also have to handle thread synchronisation, thread safety and other concurrency issues.
- Concurrency Issues: Multithreading programs also have to deal with different concurrency issue like Race Conditions, Deadlocks and starvation.
- Increased Overheads in Thread Management: Multithreading also increases the overheads as it has to manage the creation, synchronisation and context switching between the threads. Which can lead to increases memory usage. Also creating too many threads than the available CPU cores can lead to performance degradations.
- Increased Risk of Bugs: Multithreaded programs are more prone to bugs and are hard to debug.
Similar Reads
C Programming Language Tutorial
C is a general-purpose, procedural, and middle-level programming language developed by Dennis M. Ritchie at Bell Laboratories in 1972. It is also known as the "mother of all programming languages" as it influenced many modern programming languages like C++, Java, Python, and Go. Why learn C?The C la
5 min read
C Basics
C Language Introduction
C is a procedural programming language initially developed by Dennis Ritchie in the year 1972 at Bell Laboratories of AT&T Labs. It was mainly developed as a system programming language to write the UNIX operating system. The main features of the C language include: General Purpose and PortableP
6 min read
Features of C Programming Language
C is a procedural programming language. It was initially developed by Dennis Ritchie in the year 1972. It was mainly developed as a system programming language to write an operating system. The main features of C language include low-level access to memory, a simple set of keywords, and a clean styl
3 min read
C Programming Language Standard
Introduction:The C programming language has several standard versions, with the most commonly used ones being C89/C90, C99, C11, and C18. C89/C90 (ANSI C or ISO C) was the first standardized version of the language, released in 1989 and 1990, respectively. This standard introduced many of the featur
6 min read
C Hello World Program
The “Hello World†program is the first step towards learning any programming language. It is also one of the simplest programs that is used to introduce aspiring programmers to the programming language. It typically outputs the text "Hello, World!" to the console screen. C Program to Print "Hello Wo
1 min read
Compiling a C Program: Behind the Scenes
The compilation is the process of converting the source code of the C language into machine code. As C is a mid-level language, it needs a compiler to convert it into an executable code so that the program can be run on our machine. The C program goes through the following phases during compilation:
4 min read
C Comments
The comments in C are human-readable explanations or notes in the source code of a C program. A comment makes the program easier to read and understand. These are the statements that are not executed by the compiler or an interpreter. Example: [GFGTABS] C #include <stdio.h> int main() { // Thi
3 min read
Tokens in C
In C programming, tokens are the smallest units in a program that have meaningful representations. Tokens are the building blocks of a C program, and they are recognized by the C compiler to form valid expressions and statements. Tokens can be classified into various categories, each with specific r
4 min read
Keywords in C
In C Programming language, there are many rules so to avoid different types of errors. One of such rule is not able to declare variable names with auto, long, etc. This is all because these are keywords. Let us check all keywords in C language. What are Keywords?Keywords are predefined or reserved w
11 min read
C Variables and Constants
C Variables
In C, variable is a name given to the memory location to easily store data and access it when required. It allows us to use the memory without having to memorize the exact memory address. A variable name can be used anywhere as a substitute in place of the value it stores. Create VariablesTo create
5 min read
Constants in C
In C programming, constants are read-only values that cannot be modified during the execution of a program. These constants can be of various types, such as integer, floating-point, string, or character constants. They are initialized with the declaration and remain same till the end of the program.
3 min read
Const Qualifier in C
The qualifier const can be applied to the declaration of any variable to specify that its value will not be changed (which depends upon where const variables are stored, we may change the value of the const variable by using a pointer). The result is implementation-defined if an attempt is made to c
6 min read
Different ways to declare variable as constant in C
There are many different ways to make the variable as constant in C. Some of the popular ones are: Using const KeywordUsing MacrosUsing enum Keyword1. Using const KeywordThe const keyword specifies that a variable or object value is constant and can't be modified at the compilation time. Syntaxconst
2 min read
Scope rules in C
The scope of a variable in C is the block or the region in the program where a variable is declared, defined, and used. Outside this region, we cannot access the variable, and it is treated as an undeclared identifier. The scope is the area under which a variable is visible.The scope of an identifie
6 min read
Internal Linkage and External Linkage in C
In C, linkage is a concept that describes how names/identifiers can or cannot refer to the same entity throughout the whole program or a single translation unit. The above sounds similar to scope, but it is not so. To understand what the above means, let us dig deeper into the compilation process. B
5 min read
Global Variables in C
Prerequisite: Variables in C In a programming language, each variable has a particular scope attached to them. The scope is either local or global. This article will go through global variables, their advantages, and their properties. The Declaration of a global variable is very similar to that of a
3 min read
C Data Types
Data Types in C
Each variable in C has an associated data type. It specifies the type of data that the variable can store like integer, character, floating, double, etc. Example: [GFGTABS] C++ int number; [/GFGTABS]The above statement declares a variable with name number that can store integer values. C is a static
6 min read
Literals in C
In C, Literals are the constant values that are assigned to the variables. Literals represent fixed values that cannot be modified. Literals contain memory but they do not have references as variables. Generally, both terms, constants, and literals are used interchangeably. For example, “const int =
4 min read
Escape Sequence in C
The escape sequence in C is the characters or the sequence of characters that can be used inside the string literal. The purpose of the escape sequence is to represent the characters that cannot be used normally using the keyboard. Some escape sequence characters are the part of ASCII charset but so
5 min read
bool in C
The bool in C is a fundamental data type in most that can hold one of two values: true or false. It is used to represent logical values and is commonly used in programming to control the flow of execution in decision-making statements such as if-else statements, while loops, and for loops. In this a
6 min read
Integer Promotions in C
Some data types like char , short int take less number of bytes than int, these data types are automatically promoted to int or unsigned int when an operation is performed on them. This is called integer promotion. For example no arithmetic calculation happens on smaller types like char, short and e
2 min read
Character Arithmetic in C
As already known character range is between -128 to 127 or 0 to 255. This point has to be kept in mind while doing character arithmetic. What is Character Arithmetic?Character arithmetic is used to implement arithmetic operations like addition, subtraction, multiplication, and division on characters
2 min read
Type Conversion in C
In C, type conversion refers to the process of converting one data type to another. It can be done automatically by the compiler or manually by the programmer. The type conversion is only performed to those data types where conversion is possible. Let's take a look at an example: [GFGTABS] C #includ
4 min read
C Input/Output
Basic Input and Output in C
In C programming, input and output operations refer to reading data from external sources and writing data to external destinations outside the program. C provides a standard set of functions to handle input from the user and output to the screen or to files. These functions are part of the standard
2 min read
Format Specifiers in C
The format specifier in C is used to tell the compiler about the type of data to be printed or scanned in input and output operations. They always start with a % symbol and are used in the formatted string in functions like printf(), scanf, sprintf(), etc. The C language provides a number of format
6 min read
printf in C
In C language, printf() function is used to print formatted output to the standard output stdout (which is generally the console screen). The printf function is the most used output function in C and it allows formatting the output in many ways. Example: [GFGTABS] C #include <stdio.h> int main
6 min read
scanf in C
In C, scanf is a function that stands for Scan Formatted String. It is the most used function to read data from stdin (standard input stream i.e. usually keyboard) and stores the result into the given arguments. It can accept character, string, and numeric data from the user using standard input. It
4 min read
Scansets in C
scanf family functions support scanset specifiers which are represented by %[]. Inside scanset, we can specify single character or range of characters. While processing scanset, scanf will process only those characters which are part of scanset. We can define scanset by putting characters inside squ
2 min read
Formatted and Unformatted Input/Output functions in C with Examples
This article focuses on discussing the following topics in detail- Formatted I/O Functions.Unformatted I/O Functions.Formatted I/O Functions vs Unformatted I/O Functions.Formatted I/O Functions Formatted I/O functions are used to take various inputs from the user and display multiple outputs to the
9 min read
C Operators
Operators in C
In C language, operators are symbols that represent some kind of operations to be performed. They are the basic components of the C programming. In this article, we will learn about all the operators in C with examples. What is an Operator in C?A C operator can be defined as the symbol that helps us
13 min read
Arithmetic Operators in C
Arithmetic operators are the type of operators used to perform basic math operations like addition, subtraction, and multiplication. Let's take a look at an example: [GFGTABS] C #include <stdio.h> int main() { // Calculate the area of the triangle int sum = 10 + 20; printf("%d", sum)
5 min read
Unary Operators in C
In C programming, unary operators are operators that operate on a single operand. These operators are used to perform operations such as negation, incrementing or decrementing a variable, or checking the size of a variable. They provide a way to modify or manipulate the value of a single variable in
6 min read
Relational Operators in C
In C, relational operators are the symbols that are used for comparison between two values to understand the type of relationship a pair of numbers shares. The result that we get after the relational operation is a boolean value, that tells whether the comparison is true or false. Relational operato
4 min read
Bitwise Operators in C
In C, the following 6 operators are bitwise operators (also known as bit operators as they work at the bit-level). They are used to perform bitwise operations in C. The & (bitwise AND) in C takes two numbers as operands and does AND on every bit of two numbers. The result of AND is 1 only if bot
7 min read
C Logical Operators
Logical operators in C are used to combine multiple conditions/constraints. Logical Operators returns either 0 or 1, it depends on whether the expression result is true or false. In C programming for decision-making, we use logical operators. We have 3 logical operators in the C language: Logical AN
5 min read
Assignment Operators in C
In C, assignment operators are used to assign values to variables. The left operand is the variable and the right operand is the value being assigned. The value on the right must match the data type of the variable otherwise, the compiler will raise an error. Let's take a look at an example: [GFGTAB
5 min read
Increment and Decrement Operators in C
The increment ( ++ ) and decrement ( -- ) operators in C are unary operators for incrementing and decrementing the numeric values by 1 respectively. The incrementation and decrementation are one of the most frequently used operations in programming for looping, array traversal, pointer arithmetic, a
4 min read
Conditional or Ternary Operator (?:) in C
The conditional operator in C is kind of similar to the if-else statement as it follows the same algorithm as of if-else statement but the conditional operator takes less space and helps to write the if-else statements in the shortest way possible. It is also known as the ternary operator in C as it
3 min read
sizeof operator in C
Sizeof is a much-used operator in the C. It is a compile-time unary operator which can be used to compute the size of its operand. The result of sizeof is of the unsigned integral type which is usually denoted by size_t. sizeof can be applied to any data type, including primitive types such as integ
3 min read
Operator Precedence and Associativity in C
Operator precedence and associativity are rules that decide the order in which parts of an expression are calculated. Precedence tells us which operators should be evaluated first, while associativity determines the direction (left to right or right to left) in which operators with the same preceden
8 min read
C Control Statements Decision-Making
Decision Making in C (if , if..else, Nested if, if-else-if )
In C, programs can choose which part of the code to execute based on some condition. This ability is called decision making and the statements used for it are called conditional statements. These statements evaluate one or more conditions and make the decision whether to execute a block of code or n
8 min read
C - if Statement
The if in C is the simplest decision-making statement. It consists of the test condition and a block of code that is executed if and only if the given condition is true. Otherwise, it is skipped from execution. Let's take a look at an example: [GFGTABS] C #include <stdio.h> int main() { int n
4 min read
C if else Statement
The if else in C is an extension of the if statement which not only allows the program to execute one block of code if a condition is true, but also a different block if the condition is false. This enables making decisions with two possible outcomes. Let's take a look at an example: [GFGTABS] C #in
3 min read
C if else if ladder
In C, if else if ladder is an extension of if else statement used to test a series of conditions sequentially, executing the code for the first true condition. A condition is checked only if all previous ones are false. Once a condition is true, its code block executes, and the ladder ends. Example:
3 min read
Switch Statement in C
In C, switch statement is a control flow structure that allows you to execute one of many code blocks based on the value of an expression. It is often used in place of if-else ladder when there are multiple conditional codes. Example: [GFGTABS] C #include <stdio.h> int main() { // Switch varia
6 min read
Using Range in switch Case in C
You all are familiar with switch case in C, but did you know you can use a range of numbers instead of a single number or character in the case statement? Range in switch case can be useful when we want to run the same set of statements for a range of numbers so that we do not have to write cases se
2 min read
C - Loops
In C programming, there is often a need for repeating the same part of the code multiple times. For example, to print a text three times, we have to use printf() three times as shown in the code: [GFGTABS] C #include <stdio.h> int main() { printf( "Hello GfG\n"); printf( "Hello
7 min read
C for Loop
In C programming, the for loop is used to repeatedly execute a block of code as many times as instructed. It uses a variable (loop variable) whose value is used to decide the number of repetitions. It is generally used when we know how many times we want to repeat the code. Let's take a look at an e
4 min read
while Loop in C
The while loop in C allows a block of code to be executed repeatedly as long as a given condition remains true. It is often used when we want to repeat a block of code till some condition is satisfied. Let's take a look at an example: [GFGTABS] C #include <stdio.h> int main() { int i = 1; // C
5 min read
do...while Loop in C
The do...while loop is a type of loop in C that executes a block of code until the given condition is satisfied. The feature of do while loops is that unlike the while loop, which checks the condition before executing the loop, the do...while loop ensures that the code inside the loop is executed at
4 min read
For vs. While
In C, loops are the fundamental part of language that are used to repeat a block of code multiple times. The two most commonly used loops are the for loop and the while loop. Although they achieve the same result, their structure, use cases, and flexibility differ. The below table highlights some pr
4 min read
Continue Statement in C
The continue statement in C is a jump statement used to skip the current iteration of a loop and continue with the next iteration. It is used inside loops (for, while, or do-while) along with the conditional statements to bypass the remaining statements in the current iteration and move on to next i
4 min read
Break Statement in C
The break in C is a loop control statement that breaks out of the loop when encountered. It can be used inside loops or switch statements to bring the control out of the block. The break statement can only break out of a single loop at a time. Let's take a look at an example: [GFGTABS] C #include
5 min read
goto Statement in C
The goto statement in C allows the program to jump to some part of the code, giving you more control over its execution. While it can be useful in certain situations, like error handling or exiting complex loops, it's generally not recommended because it can make the code harder to read and maintain
4 min read
C Functions
C Functions
A function in C is a set of statements that when called perform some specific tasks. It is the basic building block of a C program that provides modularity and code reusability. The programming statements of a function are enclosed within { } braces, having certain meanings and performing certain op
10 min read
User-Defined Function in C
A user-defined function is a type of function in C language that is defined by the user himself to perform some specific task. It provides code reusability and modularity to our program. User-defined functions are different from built-in functions as their working is specified by the user and no hea
6 min read
Parameter Passing Techniques in C
In C, passing values to a function means providing data to the function when it is called so that the function can use or manipulate that data. Here: Formal Parameters: Variables used in parameter list in a function declaration/definition as placeholders. Also called only parameters.Actual Parameter
4 min read
Function Prototype in C
In C, a function prototype is a statement that tells the compiler about the function’s name, its return type, numbers, and data types of its parameters. Using this information, the compiler cross-checks function parameters and their data type with function definition and function call. For example,
6 min read
How can I return multiple values from a function?
In C programming, a function can return only one value directly. However, C also provides several indirect methods in to return multiple values from a function. In this article, we will learn the different ways to return multiple values from a function in C. The most straightforward method to return
3 min read
main Function in C
The main function is the entry point of a C program. It is a user-defined function where the execution of a program starts. Every C program must contain, and its return value typically indicates the success or failure of the program. In this article, we will learn more about the main function in C.
5 min read
Implicit Return Type int in C
In C, every function has a return type that indicates the type of value it will return, and it is defined at the time of function declaration or definition. But in C language, it is possible to define functions without mentioning the return type and by default, int is implicitly assumed that the ret
2 min read
Callbacks in C
A callback is any executable code that is passed as an argument to another code, which is expected to call back (execute) the argument at a given time. In simple terms, a callback is the process of passing a function (executable code) to another function as an argument, and then it is called by the
4 min read
Nested Functions in C
Nesting of functions refers to placing the definition of the function inside another functions. In C programming, nested functions are not allowed. We can only define a function globally. Example: [GFGTABS] C #include <stdio.h> int main() { void fun(){ printf("GeeksForGeeks"); } fun(
4 min read
Variadic Functions in C
In C, variadic functions are functions that can take a variable number of arguments. This feature is useful when the number of arguments for a function is unknown. It takes one fixed argument and then any number of arguments can be passed. Let's take a look at an example: [GFGTABS] C #include <st
5 min read
_Noreturn function specifier in C
In C, the _Noreturn specifier is used to indicate that a function does not return a value. It tells the compiler that the function will either exit the program or enter an infinite loop, so it will never return control to the calling function. This helps the compiler to optimize code and issue warni
2 min read
Predefined Identifier __func__ in C
Before we start discussing __func__, let us write some code snippets and anticipate the output: C/C++ Code // C program to demonstrate working of a // Predefined Identifier __func__ #include <stdio.h> int main() { // %s indicates that the program will read strings printf("%s", __func
2 min read
C Library math.h Functions
The math.h header defines various C mathematical functions and one macro. All the functions available in this library take double as an argument and return double as the result. Let us discuss some important C math functions one by one. C Math Functions1. double ceil (double x) The C library functio
6 min read
C Arrays & Strings
C Arrays
An array in C is a fixed-size collection of similar data items stored in contiguous memory locations. It can be used to store the collection of primitive data types such as int, char, float, etc., and also derived and user-defined data types such as pointers, structures, etc. Array DeclarationIn C,
9 min read
Properties of Array in C
An array in C is a fixed-size homogeneous collection of elements stored at a contiguous memory location. It is a derived data type in C that can store elements of different data types such as int, char, struct, etc. It is one of the most popular data types widely used by programmers to solve differe
8 min read
Multidimensional Arrays in C - 2D and 3D Arrays
Prerequisite: Arrays in C A multi-dimensional array can be defined as an array that has more than one dimension. Having more than one dimension means that it can grow in multiple directions. Some popular multidimensional arrays are 2D arrays and 3D arrays. In this article, we will learn about multid
10 min read
Initialization of Multidimensional Array in C
In C, multidimensional arrays are the arrays that contain more than one dimensions. These arrays are useful when we need to store data in a table or matrix-like structure. In this article, we will learn the different methods to initialize a multidimensional array in C. The easiest method for initial
4 min read
Pass Array to Functions in C
Passing an array to a function allows the function to directly access and modify the original array. In this article, we will learn how to pass arrays to functions in C. In C, arrays are always passed to function as pointers. They cannot be passed by value because of the array decay due to which, wh
3 min read
How to pass a 2D array as a parameter in C?
A 2D array is essentially an array of arrays, where each element of the main array holds another array. In this article, we will see how to pass a 2D array to a function. The simplest and most common method to pass 2D array to a function is by specifying the parameter as 2D array with row size and c
3 min read
What are the data types for which it is not possible to create an array?
In C, an array is a collection of variables of the same data type, stored in contiguous memory locations. Arrays can store data of primitive types like integers, characters, and floats, as well as user-defined types like structures. However, there are certain data types for which arrays cannot be di
2 min read
How to pass an array by value in C ?
In C programming, arrays are always passed as pointers to the function. There are no direct ways to pass the array by value. However, there is trick that allows you to simulate the passing of array by value by enclosing it inside a structure and then passing that structure by value. This will also p
2 min read
Strings in C
A String in C programming is a sequence of characters terminated with a null character '\0'. The C String is work as an array of characters. The difference between a character array and a C string is that the string in C is terminated with a unique character '\0'. DeclarationDeclaring a string in C
6 min read
Array of Strings in C
In C, an array of strings is a 2D array where each row contains a sequence of characters terminated by a '\0' NULL character (strings). It is used to store multiple strings in a single array. Let's take a look at an example: [GFGTABS] C #include <stdio.h> int main() { // Creating array of stri
3 min read
What is the difference between single quoted and double quoted declaration of char array?
In C programming, the way we declare and initialize a char array can differ based on whether we want to use a sequence of characters and strings. They are basically same with difference only of a '\0' NULL character. Double quotes automatically include the null terminator, making the array a string
2 min read
C String Functions
C language provides various built-in functions that can be used for various operations and manipulations on strings. These string functions make it easier to perform tasks such as string copy, concatenation, comparison, length, etc. The <string.h> header file contains these string functions. T
7 min read
C Pointers
C Pointers
A pointer is a variable that stores the memory address of another variable. Instead of holding a direct value, it has the address where the value is stored in memory. This allows us to manipulate the data stored at a specific memory location without actually using its variable. It is the backbone of
10 min read
Pointer Arithmetics in C with Examples
Pointer Arithmetic is the set of valid arithmetic operations that can be performed on pointers. The pointer variables store the memory address of another variable. It doesn't store any value. Hence, there are only a few operations that are allowed to perform on Pointers in C language. The C pointer
10 min read
C - Pointer to Pointer (Double Pointer)
In C, double pointers are those pointers which stores the address of another pointer. The first pointer is used to store the address of the variable, and the second pointer is used to store the address of the first pointer. That is why they are also known as a pointer to pointer. Let's take a look a
5 min read
Function Pointer in C
In C, a function pointer is a type of pointer that stores the address of a function, allowing functions to be passed as arguments and invoked dynamically. It is useful in techniques such as callback functions, event-driven programs, and polymorphism (a concept where a function or operator behaves di
6 min read
How to Declare a Pointer to a Function?
A pointer to a function is similar to a pointer to a variable. However, instead of pointing to a variable, it points to the address of a function. This allows the function to be called indirectly, which is useful in situations like callback functions or event-driven programming. In this article, we
2 min read
Pointer to an Array | Array Pointer
A pointer to an array is a pointer that points to the whole array instead of the first element of the array. It considers the whole array as a single unit instead of it being a collection of given elements. Consider the following example: [GFGTABS] C #include<stdio.h> int main() { int arr[5] =
5 min read
Difference between constant pointer, pointers to constant, and constant pointers to constants
In this article, we will discuss the differences between constant pointer, pointers to constant & constant pointers to constants. Pointers are the variables that hold the address of some other variables, constants, or functions. There are several ways to qualify pointers using const. Pointers to
3 min read
Pointer vs Array in C
Most of the time, pointer and array accesses can be treated as acting the same, the major exceptions being:  1. the sizeof operator sizeof(array) returns the amount of memory used by all elements in the array sizeof(pointer) only returns the amount of memory used by the pointer variable itself 2.
1 min read
Dangling, Void , Null and Wild Pointers in C
In C programming pointers are used to manipulate memory addresses, to store the address of some variable or memory location. But certain situations and characteristics related to pointers become challenging in terms of memory safety and program behavior these include Dangling (when pointing to deall
6 min read
Near, Far and Huge Pointers in C
In older times, the intel processors had 16-bit registers, but the address bus was 20-bits wide. Due to this, CPU registers were not able to hold the entire address at once. As a solution, the memory was divided into segments of 64 kB size, and the near pointers, far pointers, and huge pointers were
4 min read
restrict Keyword in C
The restrict keyword is a type qualifier that was introduced in the C99 standard. It is used to tell the compiler that a pointer is the only reference or access point to the memory it points to, allowing the compiler to make optimizations based on that information. Let's take a look at an example: [
3 min read