System of Linear Equations
Last Updated :
05 Feb, 2025
In mathematics, a system of linear equations consists of two or more linear equations that share the same variables. These systems often arise in real-world applications, such as engineering, physics, economics, and more, where relationships between variables need to be analyzed. Understanding how to solve these systems helps in finding the intersection points of lines or planes, which represent the solution to the equations.
- A system of linear equations consists of multiple linear equations with shared variables, where each equation represents a line, plane, or higher-dimensional surface based on the number of variables.
- The solution is the set of variable values that satisfy all equations, often corresponding to the points of intersection of the represented lines or planes.
Here is simple example of system of linear equations:
General form
A system of linear equations consists of multiple linear equations involving the same set of variables. It can be represented as follows:
a11x1 + a12x2 + a13x3 + …. + a1nxn = b1
a21x1 + a22x2 + a23x3 + …. + a2nxn = b2
…………………………………..
…………………………………..
an1x1 + an2x2 + an3x3 + …. + annxn = bn
This represents a system of n linear equations in n variables x1, x2, x3,…., xn.
Where,
- a11, a12, …, a21, a22,…, an1, an2,…, ann are the coefficients of variables, x1, x2,…., xn.
- b1 + b2 + b3 + …. + bn are the constants on the right-hand side of each equation.
Matrix Equation
These equations can be written in matrix form as AX = B, where:
- A is the coefficient matrix,
- X is the column vector of variables [x1, x2, x3,…., xn ]T ,
- B is the column vector of constants [b1 + b2 + b3 + …. + bn ]T.
A =\begin{bmatrix} a_{11} & a_{12} & a_{13}& \cdots & a_{1n} \\ a_{21} & a_{22} & a_{23}& \cdots & a_{2n} \\ a_{31} & a_{32} & a_{33}&\cdots & a_{3n}\\\vdots & \vdots & \vdots & \ddots & \vdots \\ a_{m1} & a_{m2} & a_{m3} &\cdots & a_{mn} \end{bmatrix} , X = \begin{bmatrix} x_1 \\ x_2 \\ x_3 \\\vdots \\x_{n}\end{bmatrix} and\ B = \begin{bmatrix} b_1 \\ b_2 \\ b_3 \\\vdots \\b_{m}\end{bmatrix}
Solving the system involves finding the values of x1, x2, x3,…., xn that satisfy all equations simultaneously.
Solution of a System of Linear Equation
A system of linear equations can have three possible types of solutions:
- No Solution (Inconsistent System)
- Unique Solution (Consistent and Determinate System)
- Infinite Solutions (Consistent and Indeterminate System)
The existence and nature of solutions depend on the properties of the coefficient matrix A and the augmented matrix [A:B].
A system of linear equations can be categorized into two types:
- Homogeneous System (AX=0)
- Non-Homogeneous System (AX=B)
The solution of these systems depends on the rank of the coefficient matrix A and the rank of the augmented matrix [A:B].
1) System of Homogeneous linear equations AX = 0
- X = 0 is always a solution; means all the unknowns has same value as zero. (This is also called trivial solution)
- If P(A) = number of unknowns : Unique solution ( P(A) = Rank of matrix A).
- If P(A) < number of unknowns : Infinite number of solutions.
Since a homogeneous system always has at least one solution (X = 0), it is always consistent.
Example of Homogeneous System in three variable
x + y - z = 0
x + y + z = 0
x - y + 2z = 0
2) System of Non-Homogeneous linear equations AX = B
- If P[A:B] ≠ P(A), No solution.
- If P[A:B] = P(A) = Number of unknown variables, unique solution.
- If P[A:B] = P(A) ≠ Number of unknown, infinite number of solutions.
Example of Non - Homogeneous System in three variable
x + y - 2z = 6
x - 6y + z = 9
2x - y + 2z = 2
Geometric interpretation
for a system of two linear equations with two variables (x and y): Since each linear equation represents a line on the xy-plane, solving a system of two equations means finding the points where the lines intersect. There are three possibilities:
1) The lines intersect at one point: This point is the unique solution to the system.

2) The lines are parallel: They never intersect, so there is no solution. The system is called inconsistent.
3) The lines are coincident: They are the same line, so every point on the line is a solution. There are infinitely many solutions.
The solution set to a system of two linear equations in two variables can be a single point, the empty set (no solution), or an infinite set of points (a line).
For n variables, each linear equation determines a hyperplane in n-dimensional space. The solution set is the intersection of these hyperplanes, and is a flat, which may have any dimension lower than n.
How to Solve System of Linear Equations?
The subsequent techniques for solving the system of linear equations AX = B are viable solely under the condition that the coefficient matrix A is non-singular, meaning |A| ≠ 0 (determinant is not zero).
These methods include:
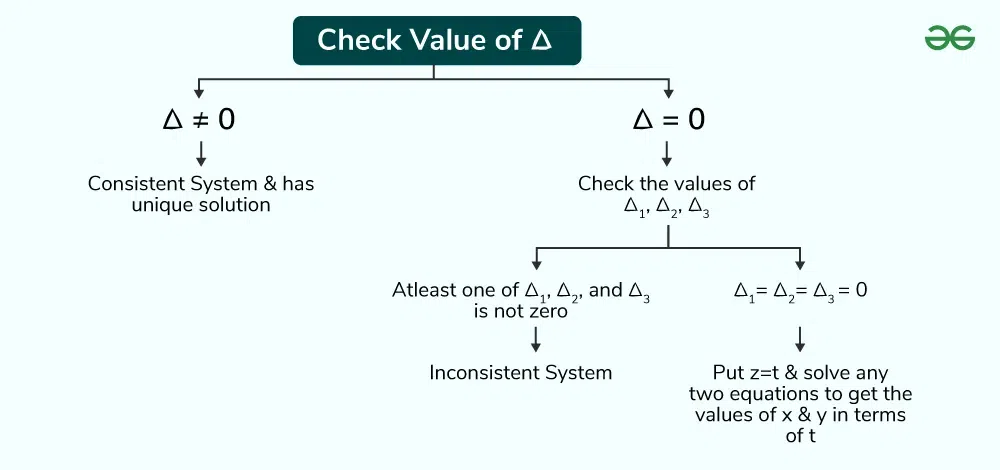
Cramer’s Rule
Cramer’s rule is applicable only when certain conditions are satisfied. The important condition of Cramer’s rules are,
 System of Linear Equations
System of Linear EquationsApplications System of Linear Equations in Engineering
Systems of linear equations are widely used in various engineering disciplines:
- Structural Analysis: In civil and mechanical engineering, systems of linear equations are used to analyze forces in structures, determine displacements, and design stable frameworks.
- Electrical Circuit Analysis: In electrical engineering, Kirchhoff's laws lead to systems of linear equations that are used to analyze currents and voltages in electrical circuits.
- Control Systems: In control engineering, linear equations model dynamic systems and are used to design controllers that ensure desired system behavior.
- Optimization Problems: In industrial engineering and operations research, systems of linear equations arise in linear programming problems used to optimize production, transportation, and resource allocation.
Examples on System of Linear Equations
Example 1: Solve the system:
Solution:
From equation first : y = 5 - x
Substitute into equation second : 2x - (5 - x) = 1
3x - 5 = 1
3x = 6
x = 2
Substitute back to find y: y = 5 - 2 = 3
Answer: (x,y)= (2, 3)
Example 2: Solve using substitution:
Solution:
From equation second : x = 1 + y
Substitute into equation first : 3(1 + y) + 2y = 13
3 + 3y + 2y = 13
5y = 10
y = 2
Substitute back: x = 1 + 2 = 3
Answer: (x,y)=(3, 2)
Example 3: Solve using elimination:
Solution:
Add the equations: 6x = 10
x = 5/3
Substitute into first equation: 2(5/3) + 3y = 8
10/3 + 3y = 8
3y = 14/3
y = 14/9
Answer: (5/3, 14/9)
Example 4: Determine if the system is consistent:
Solution:
Multiply the first equation by 2: 4x + 2y = 8
This is identical to the second equation, so the system is consistent with infinitely many solutions.
Example 5: Solve graphically:
Solution:
Plot both lines. They intersect at (1, 3).
Answer: (1, 3)
Example 6: Solve using Cramer's Rule:
Solution:
D = \begin{vmatrix}3&2\\1&1\\\end{vmatrix} = 3(1) - 2(1) = 1
Dx = \begin{vmatrix}14&2\\6&1\\\end{vmatrix} = 14(1) - 2(6) = 2
Dy = \begin{vmatrix}3&14\\1&6\\\end{vmatrix}= 3(6) - 14(1) = 4
x = Dx/D = 2/1 = 2
y = Dy/D = 4/1 = 4
Answer: (2, 4)
Practice Problems on System of Linear Equations
Problem 1. Solve the system:
Problem 2. Determine if the system is consistent:
Problem 3. Solve using substitution:
Problem 4. Solve the 3x3 system:
- x + y - z = 2
- 2x + y + z = 7
- x - y + 2z = 4
Problem 5. Solve graphically:
Problem 6. Use Cramer's Rule to solve:
Problem 7. Determine the nature of the system:
Problem 8. Solve using Gauss Elimination:
- 2x+3y+z=10
- 4x−y+5z=5
- x+2y−3z=−4
Similar Reads
Engineering Mathematics Tutorials
Engineering mathematics is a vital component of the engineering discipline, offering the analytical tools and techniques necessary for solving complex problems across various fields. Whether you're designing a bridge, optimizing a manufacturing process, or developing algorithms for computer systems,
3 min read
Matrix and Determinants
Matrices
Matrices are key concepts in mathematics, widely used in solving equations and problems in fields like physics and computer science. A matrix is simply a grid of numbers, and a determinant is a value calculated from a square matrix.Example: \begin{bmatrix} 6 & 9 \\ 5 & -4 \\ \end{bmatrix}_{2
3 min read
Different Operations on Matrices
For an introduction to matrices, you can refer to the following article: Matrix Introduction In this article, we will discuss the following operations on matrices and their properties: Matrices AdditionMatrices SubtractionMatrices MultiplicationMatrices Addition: The addition of two matrices A m*n a
11 min read
Representation of Relation in Graphs and Matrices
Understanding how to represent relations in graphs and matrices is fundamental in engineering mathematics. These representations are not only crucial for theoretical understanding but also have significant practical applications in various fields of engineering, computer science, and data analysis.
8 min read
Determinant of Matrix with Solved Examples
The determinant of a matrix is a scalar value that can be calculated for a square matrix (a matrix with the same number of rows and columns). It serves as a scaling factor that is used for the transformation of a matrix.It is a single numerical value that plays a key role in various matrix operation
15+ min read
Properties of Determinants
Properties of Determinants are the properties that are required to solve various problems in Matrices. There are various properties of the determinant that are based on the elements, rows, and columns of the determinant. These properties help us to easily find the value of the determinant. Suppose w
10 min read
Row Echelon Form
Row Echelon Form (REF) of a matrix simplifies solving systems of linear equations, understanding linear transformations, and working with matrix equations. A matrix is in Row Echelon form if it has the following properties:Zero Rows at the Bottom: If there are any rows that are completely filled wit
4 min read
Eigenvalues and Eigenvectors
Eigenvectors are the directions that remain unchanged during a transformation, even if they get longer or shorter. Eigenvalues are the numbers that indicate how much something stretches or shrinks during that transformation. These ideas are important in many areas of math and engineering, including
15+ min read
System of Linear Equations
In mathematics, a system of linear equations consists of two or more linear equations that share the same variables. These systems often arise in real-world applications, such as engineering, physics, economics, and more, where relationships between variables need to be analyzed. Understanding how t
8 min read
Matrix Diagonalization
Matrix diagonalization is the process of reducing a square matrix into its diagonal form using a similarity transformation. This process is useful because diagonal matrices are easier to work with, especially when raising them to integer powers.Not all matrices are diagonalizable. A matrix is diagon
8 min read
LU Decomposition
LU decomposition or factorization of a matrix is the factorization of a given square matrix into two triangular matrices, one upper triangular matrix and one lower triangular matrix, such that the product of these two matrices gives the original matrix. It was introduced by Alan Turing in 1948, who
7 min read
Finding Inverse of a Square Matrix using Cayley Hamilton Theorem in MATLAB
Matrix is the set of numbers arranged in rows & columns in order to form a Rectangular array. Here, those numbers are called the entries or elements of that matrix. A Rectangular array of (m*n) numbers in the form of 'm' horizontal lines (rows) & 'n' vertical lines (called columns), is calle
4 min read
Sequence and Series
Binomial Theorem
Binomial theorem is a fundamental principle in algebra that describes the algebraic expansion of powers of a binomial. According to this theorem, the expression (a + b)n where a and b are any numbers and n is a non-negative integer. It can be expanded into the sum of terms involving powers of a and
15+ min read
Sequences and Series
A sequence is an ordered list of numbers following a specific rule. Each number in a sequence is called a "term." The order in which terms are arranged is crucial, as each term has a specific position, often denoted as an​, where n indicates the position in the sequence.For example:2, 5, 8, 11, 14,
7 min read
Finding nth term of any Polynomial Sequence
Given a few terms of a sequence, we are often asked to find the expression for the nth term of this sequence. While there is a multitude of ways to do this, In this article, we discuss an algorithmic approach which will give the correct answer for any polynomial expression. Note that this method fai
4 min read
Mathematics | Sequence, Series and Summations
Sequences, series, and summations are fundamental concepts of mathematical analysis and it has practical applications in science, engineering, and finance.Table of ContentWhat is Sequence?Theorems on SequencesProperties of SequencesWhat is Series?Properties of SeriesTheorems on SeriesSummation Defin
8 min read
Calculus
Limits in Calculus
Limits are used in calculus to define differential, continuity, and integrals, and they are defined as the approaching value of the function with the input approaching to ascertain value.Let's say we have a function f(x) = x2. In the graph given below, notice that as x⇢0, f(x) also tends to become z
10 min read
Indeterminate Forms
Assume a function F(x)=\frac{f(x)}{g(x)} which is undefined at x=a but it may approach a limit as x approaches a. The process of determining such a limit is known as evaluation of indeterminate forms. The L' Hospital Rule helps in the evaluation of indeterminate forms. According to this rule- \lim_{
3 min read
Limits, Continuity and Differentiability
Limits, Continuity, and Differentiation are fundamental concepts in calculus. They are essential for analyzing and understanding function behavior and are crucial for solving real-world problems in physics, engineering, and economics.Table of ContentLimitsKey Characteristics of LimitsExample of Limi
10 min read
Cauchy's Mean Value Theorem
Cauchy's Mean Value theorem provides a relation between the change of two functions over a fixed interval with their derivative. It is a special case of Lagrange Mean Value Theorem. Cauchy's Mean Value theorem is also called the Extended Mean Value Theorem or the Second Mean Value Theorem.According
7 min read
Lagrange's Mean Value Theorem
Lagrange's Mean Value Theorem (LMVT) is a fundamental result in differential calculus, providing a formalized way to understand the behavior of differentiable functions. This theorem generalizes Rolle's Theorem and has significant applications in various fields of engineering, physics, and applied m
9 min read
Rolle's Mean Value Theorem
Rolle's theorem one of the core theorem of calculus states that, for a differentiable function that attains equal values at two distinct points then it must have at least one fixed point somewhere between them where the first derivative of the function is zero.Rolle's Theorem and the Mean Value Theo
8 min read
Taylor Series
A Taylor series represents a function as an infinite sum of terms, calculated from the values of its derivatives at a single point.Taylor series is a powerful mathematical tool used to approximate complex functions with an infinite sum of terms derived from the function's derivatives at a single poi
8 min read
Maclaurin series
Prerequisite - Taylor theorem and Taylor series We know that formula for expansion of Taylor series is written as: f(x)=f(a)+\sum_{n=1}^{\infty}\frac{f^n(a)}{n!}(x-a)^n Now if we put a=0 in this formula we will get the formula for expansion of Maclaurin series. T hus Maclaurin series expansion can b
2 min read
Euler's Formula
Euler's formula holds a prominent place in the field of mathematics. It aids in establishing the essential link between trigonometric functions and complex exponential functions. It is a crucial formula used for solving complicated exponential functions. It is also known as Euler's identity. It has
5 min read
Chain Rule: Theorem, Formula and Solved Examples
Chain Rule is a way to find the derivative of composite functions. It is one of the basic rules used in mathematics for solving differential problems. It helps us to find the derivative of composite functions such as (3x2 + 1)4, (sin 4x), e3x, (ln x)2, and others. Only the derivatives of composite f
9 min read
Inverse functions and composition of functions
Inverse Functions - In mathematics a function, a, is said to be an inverse of another, b, if given the output of b a returns the input value given to b. Additionally, this must hold true for every element in the domain co-domain(range) of b. In other words, assuming x and y are constants, if b(x) =
3 min read
Definite Integral | Definition, Formula & How to Calculate
A definite integral is an integral that calculates a fixed value for the area under a curve between two specified limits. The resulting value represents the sum of all infinitesimal quantities within these boundaries. i.e. if we integrate any function within a fixed interval it is called a Definite
8 min read
Mathematics | Indefinite Integrals
Antiderivative - Definition :A function ∅(x) is called the antiderivative (or an integral) of a function f(x) of ∅(x)' = f(x). Example : x4/4 is an antiderivative of x3 because (x4/4)' = x3. In general, if ∅(x) is antiderivative of a function f(x) and C is a constant.Then, {∅
4 min read
Application of Derivative - Maxima and Minima
Derivatives have many applications, like finding rate of change, approximation, maxima/minima and tangent. In this section, we focus on their use in finding maxima and minima.Note: If f(x) is a continuous function, then for every continuous function on a closed interval has a maximum and a minimum v
6 min read
Summation Formulas
In mathematics, the summation is the basic addition of a sequence of numbers, called addends or summands; the result is their sum or total. The summation of an explicit sequence is denoted as a succession of additions. For example, the summation of (1, 3, 4, 7) can be written as 1 + 3 + 4 + 7, and t
6 min read
Statistics and Numerical Methods
Mean, Variance and Standard Deviation
Mean, Variance and Standard Deviation are fundamental concepts in statistics and engineering mathematics, essential for analyzing and interpreting data. These measures provide insights into data's central tendency, dispersion, and spread, which are crucial for making informed decisions in various en
10 min read
Mathematics - Law of Total Probability
Probability theory is the branch of mathematics concerned with the analysis of random events. It provides a framework for quantifying uncertainty, predicting outcomes, and understanding random phenomena. In probability theory, an event is any outcome or set of outcomes from a random experiment, and
12 min read
Probability Distribution - Function, Formula, Table
A probability distribution is a mathematical function or rule that describes how the probabilities of different outcomes are assigned to the possible values of a random variable. It provides a way of modeling the likelihood of each outcome in a random experiment.While a frequency distribution shows
15+ min read
Bayes' Theorem
Bayes' Theorem is a mathematical formula that helps determine the conditional probability of an event based on prior knowledge and new evidence.It adjusts probabilities when new information comes in and helps make better decisions in uncertain situations.Bayes' Theorem helps us update probabilities
12 min read
Conditional Probability
Conditional probability defines the probability of an event occurring based on a given condition or prior knowledge of another event. Conditional probability is the likelihood of an event occurring, given that another event has already occurred. In probability this is denoted as A given B, expressed
11 min read
Engineering Math Practice Problems