L13 interrupts-in-atmega328 p
2 likes783 views

This document discusses interrupts in the Atmega328P microcontroller. It describes asynchronous I/O operation using interrupts versus polling. Interrupts allow the microcontroller to perform other tasks while waiting for an I/O device to signal that it is ready. When an interrupt occurs, the microcontroller saves its state and jumps to an interrupt service routine to handle the device, then returns to its original task. The Atmega328P has multiple interrupt vectors that can be enabled or disabled individually using various register bits to control interrupts from different pins and peripherals. Example C code is provided to configure an interrupt-driven program from the INT0 pin.














L13 interrupts-in-atmega328 p
- 1. Interrupts in Atmega328P (Lecture-13) R S Ananda Murthy Associate Professor and Head Department of Electrical & Electronics Engineering, Sri Jayachamarajendra College of Engineering, Mysore 570 006 R S Ananda Murthy Interrupts in Atmega328P
- 2. Methods of I/O Operation Synchronous I/O operation. This is possible when the I/O device operates at the same speed as that of MCU. In this case the I/O operation with the device is performed by the MCU assuming that the device is always ready. Asynchronous I/O Operation. In this case, generally the I/O device is very slow when compared to the MCU. Then, it can perform I/O operation by the following methods: By polling. By using interrupts. R S Ananda Murthy Interrupts in Atmega328P
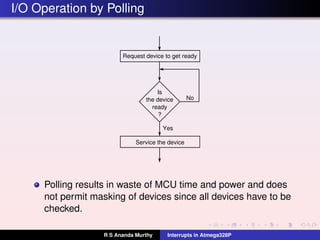
- 3. I/O Operation by Polling Is the device ready ? Request device to get ready Service the device No Yes Polling results in waste of MCU time and power and does not permit masking of devices since all devices have to be checked. R S Ananda Murthy Interrupts in Atmega328P
- 4. Polling Example R S Ananda Murthy Interrupts in Atmega328P
- 5. I/O Operation by Interrupts The MCU keeps on doing some useful operation, or it remains in a low-power state after enabling interrupts. When I/O device is ready, it interrupts the MCU. The MCU completes execution of the current instruction, saves the return address on the stack, and then jumps to the Interrupt Service Routine (ISR) to serve the device. After this, the MCU returns back to the interrupted program by loading the return address from the stack to the Program Counter. Interrupts can be enabled or disabled dynamically and when multiple interrupts come simultaneously priorities can be assigned. R S Ananda Murthy Interrupts in Atmega328P
- 6. Interrupt Example R S Ananda Murthy Interrupts in Atmega328P
- 7. Default Interrupt Vectors in Atmega328P R S Ananda Murthy Interrupts in Atmega328P
- 8. Interrupt Vectors in Atmega328P Interrupt vector is a definite address in the program memory where a JMP instruction should be written to jump to the ISR corresponding to the interrupt. Each interrupt vector occupies two program memory words in order to provide space for JMP instruction. In Atmega328P, the RESET Vector is affected by BOOTRST fuse and the Interrupt Vector start address is affected by IVSEL bit in the MCUCR. R S Ananda Murthy Interrupts in Atmega328P
- 9. Enabling and Disabling Interrupts in Atmega328P In SREG if I = 1, then all interrupts are enabled. We can make I = 1 by using SEI instruction in ALP and sei() function in C program. In SREG if I = 0, then all interrupts are disabled. We can make I = 0 by using CLI instruction in ALP and cli() function in C program. Upon reset I = 0 so all interrupts are disabled. R S Ananda Murthy Interrupts in Atmega328P
- 10. Bits of EICRA Control Nature of INT1 and INT0 Bits 7, 6, 5, and 4 are not used and are always read as 0. R S Ananda Murthy Interrupts in Atmega328P
- 11. Bits of EIMSK Mask/Unmask INT1 and INT0 Masking/unmasking means disabling/enabling respectively. When INT1 = 1 INT1 is unmasked if I = 1 in SREG. When INT1 = 0 INT1 is masked even if I = 1 in SREG. When INT0 = 1 INT0 is unmasked if I = 1 in SREG. When INT0 = 0 INT0 is masked even if I = 1 in SREG. Activity on the pins of INT1/INT0 will cause an interrupt request even if the corresponding pins are configured as output pins. Bits 2 to 7 are unused and will always be read as 0. R S Ananda Murthy Interrupts in Atmega328P
- 12. Bits of EIFR Show Status of INT1 and INT0 Bits 2 to 7 are unused and will always be read as 0. When INT1 interrupt is triggered, INTF1 becomes 1. This flag is cleared when ISR is executed. When INT0 interrupt is triggered, INTF0 becomes 1. This flag is cleared when ISR is executed. INTF1/INTF0 flags can be cleared by writing a logical 1 to the respective bit. INTF1/INTF0 flags are always cleared when the respective interrupts are configured as a level interrupt. R S Ananda Murthy Interrupts in Atmega328P
- 13. C-Code to use INT0 R S Ananda Murthy Interrupts in Atmega328P
- 14. Problem Statement to use INT0/INT1 Assume that a push button is connected to the INT0/PD2 pin of Atmega328P MCU with internal pull-up resistor enabled and that a 7-segment common cathode display is connected to PORTB lines of the MCU through 330Ω current limiting resistors. Let a high-to-low logic change on this pin cause an INT0 interrupt. Sketch a diagram showing the hardware connections. Write a program in C which displays on the LED display any integer in the range 1 to 6, both inclusive, when ever the push button is pressed, thus simulating throwing of a die. Sketch a flow chart to show the logic. Also write ALP to achieve the task mentioned above. Modify the programs written above to use INT1/PD3. R S Ananda Murthy Interrupts in Atmega328P
- 15. License This work is licensed under a Creative Commons Attribution 4.0 International License. R S Ananda Murthy Interrupts in Atmega328P