Real Time System Validation using Hardware in Loop (HIL) Digital Platform
Download as PPTX, PDF1 like1,323 views

Dr. Shimi S.L presents information on real time system validation using hardware-in-the-loop (HIL) digital platforms. HIL allows testing embedded systems by interacting them with simulated plant models in real time. This enables testing systems in unlimited scenarios without risks to actual hardware. Applications include controller design and testing, closed-loop testing of devices, SCADA systems studies, microgrid studies, and protection scheme design. DSpace and OPAL-RT are popular HIL platforms that interface simulated plant models with physical controllers using computation units and I/O interfaces. HIL provides an effective method for rigorous real-time testing of systems before deployment.















































Real Time System Validation using Hardware in Loop (HIL) Digital Platform
- 1. Real Time System Validation using Hardware in Loop (HIL) Digital Platform Dr. Shimi S.L Assistant Professor Electrical Engineering Dept NITTTR, Chandigarh
- 2. Intelligent Controllers Smart Sensors – Not Only Intelligent, but Adaptable Intelligent Actuators Plant
- 3. Is Smart & Flexible Sensors Possible ?
- 4. Microprocessor Microcontroller CPU-on-a-Chip Computer-on-a-Chip General Purpose Task Specific Used in Computer Systems Used in Embedded Systems Memory and I/O components are interfaced externally On-chip Memory and I/O Components Since external components interfaced, so the whole system is larger and costly Since On-chip components, so system is smaller and cheaper In Microprocessor based system, Instruction and data are stored in same memory module In Microcontroller based system, program memory and data memory are separate Microprocessor “CPU-on-a-Chip” Microcontroller “Computer-on-a-Chip”
- 6. CB - Connection Blocks SB - Switching Block CLB - Configurable Logic Block LUT - Look-Up-Table
- 8. Most Popular Controllers • Atmel 8051 AVR • Microchip PIC16F877 • ARM ARM7 ARM9 ARM Cortex and many more…….
- 9. Architecture-ARM Microcontroller Interrupt Address Address register Incrementer Read register 32 bit register bank 32 Bit ALU register bank Read register Instruction Pipeline Instruction decoder Debug control Interrupt Control Incrementer Data Address Data Bus Data bus Instruction Address Instruction data A Bus B Bus PCBus Write register
- 10. • Software • ARM C/C++ Compiler (armcc) Development Platform-ARM • Hardware – One DBGU serial communication port – One ZIGBEE extension connector – One JTAG debug interface – Five user- input push buttons – One Wake-UP input push button – One Reset Push Button – One Battery Socket for two AAA batteries – One 400 segments dot matrix LCD
- 11. Controller 8051 PIC ARM Bit Addressable 8 bit 8,12,14 & 16 bit 16 & 32 Bit Max. crystal Freq. (MHz) 4-16 MHz Up to 80 MHz Up to 400 MHz Operating voltage (volts) 1-5V 1.5 to 5 V 1- 5V Flash 0.5K - 384K Up to 512K 16k to 2M Cache ---- ---- 2x4k - 16k + 8k Peripherals available USART, SPI, USB, I2C USART, SPI, I2C, ADC, DAC, USB, Ethernet, CAN USART, SPI, I2C, USB, ADC, DAC, Video Decoder, Image Sensor Interface Comparison
- 12. Debug code Including external I/O stimulus Order HW boards/parts SW comp, debugger Build Prototype Enter Specifications Select Best Part Configure core, peripherals & Auto- generate Code Customize main loop/events integrate libraries & Generate Object Microcontroller Development Process
- 13. Embedded Network
- 14. ICSP (In-Circuit Serial Programming)
- 15. Microcontroller ATmega328 Operating Voltage 5V Input Voltage (recommended) 7-12V Input Voltage (limits) 6-20V Digital I/O Pins 14 (of which 6 provide PWM output) Analog Input Pins 6 DC Current per I/O Pin 40 mA DC Current for 3.3V Pin 50 mA Flash Memory 32 KB (ATmega328) of which 0.5 KB used by bootloader SRAM 2 KB (ATmega328) EEPROM 1 KB (ATmega328) Clock Speed 16 MHz
- 17. Complete Setup
- 20. Control Circuit using Arduino
- 22. 3 level Inverter waveform on CRO
- 23. dSpace 1104
- 24. Specification of DS1104 R&D Controller Board Parameter Characteristics Processor MPC8240 processor with PPC603e core and on-chip peripherals • 64-bit floating-point processor • 250 MHz CPU • 2 x 16 KB cache; on-chip • On-chip PCI bridge (33 MHz) Memory Global memory: 32 MB SDRAM • Flash memory: 8 MB ADC 1 x 16-bit ADC with mux 4 x 12-bit ADC 5 ADC channels (1 x 16-bit + 4 x 12-bit) can be sampled simultaneous • 16-bit resolution • ±10 V input voltage range • 2μs conversion time • 12-bit resolution • ±10 V input voltage range • 800 ns conversion time Slave DSP subsystem • Texas Instruments TMS320F240 DSP • 16-bit fixed-point processor • 20 MHz clock frequency • 64 K x 16 external program memory • 28 K x 16 external data memory • 4 K x 16 dual-port memory for communication • 16 K x 16 flash memory • 1 x 3-phase PWM output • 4 x 1-phase PWM output • ±13 mA maximum output current Host interface • 32-bit PCI host interface • 5VPCI slot • 33MHz±5 % Power supply • +5 V ±5 %, 2.5 A • +12 V ±5 %, 0.3 A Power consumption 18.5 W
- 27. Parameter Settings for (a) ADC, (b) ADC Multiplexed and (c) PWM Blocks (a) (b) (c)
- 28. Block Diagram Peripheral Component Interconnect Bus (PCI Bus)
- 29. MPPT of a PV System
- 32. MicroLabBox, with over 100 I/O channels of various types for applications in robotics, medical engineering, electric drives, renewable energy, consumer appliances, industrial products, automotive engineering, and aerospace
- 33. What is Real Time Simulation? Simulation execution happens in synchronism with wall clock time or real time Why real time simulation? To exchange information with physical components.
- 34. How real time simulation is done? • The complexity of the plant under control is included in test and development by adding a mathematical representation of all related dynamic systems. These mathematical representations are referred to as the “plant simulation”. The embedded system to be tested interacts with this plant simulation. • It allows testing of an unlimited number of short circuits and other transients (e.g. fault transients), as well as regular transients in the power system. Something that is impractical to do on the actual system. • Virtual, highly realistic, real-time models of the hardware (microgrid testbed) enable testing high power systems without the dangers and costs involved with testing high power.
- 35. 35 Real Time Simulation Applications For time critical studies! 1) Controller design, test and interface 2) Closed loop test of intelligent electronic devices 3) SCADA system studies; Operator training 4) Modern micro-grid/smart grid studies 5) Special Protection Schemes – design and test
- 36. Testing controllers using dSpace for grid interfaces, electric drives, and power electronics
- 38. 38 OPAL-RT HIL – General Architecture The hardware that perform real time simulation consists of Computational Units: CPU & FPGA Interfacing Units: Analog & Digital I/O cards, serial ports, PCI slots Hardware = Standard Intel PC + Xilinx FPGA + Interfacing units Standard Intel PC with Motherboard, hard-disk, RAM, CPU Xilinx FPGA Interfacing unit with Analog & Digital I/Os, serial ports, PCI slots etc. OPAL-RT Real Time Simulation Hardware
- 39. PC with MATLAB/ SIMULINK Opal-RT HIL Box
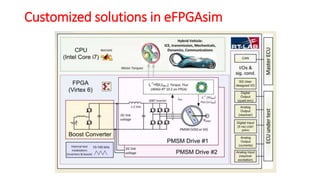
- 40. Customized solutions in eFPGAsim
- 41. Limitations of SPS for achieving real-time simulation • SPS generates a unique matrix for State-Space equations, even if the matrix is sparsed • Results in higher computation time • SPS recomputes system matrix in the real-time loop each time there is a switch change conduction state (On/Off) • Results in overruns each time a different topology occurs ARTEMIS for Real-Time Simulation of Power Systems SimPowerSystem (SPS) presentation 41
- 42. • ARTEMIS takes advantage of the sparse matrix properties to optimize the computation time : In SPS and ARTEMIS, each independent sub-circuit has its own smaller set of ABCD state-space equations • FASTER iteration. (SPS S-functions are not sparsity-optimized) switches located on different sub-networks are pre-computed independently ARTEMIS for Real-Time Simulation of Power Systems 42
- 43. • ARTEMIS accuracy : ARTEMIS solvers are designed to improve the accuracy of simulation of power system at large time steps
- 44. • Simulink signals are updated at next sample time • RT-EVENTS too, but it keeps transition information (in the time stamp) • Accuracy of gate pulses is highly increased for the same time-step RT-Events for PWM generation RT-Events concepts 44 Simulink RT-Events
- 45. Typhoon HIL
- 49. System Validation using Hardware Dr. Shimi S.L Assistant Professor Electrical Engineering Dept NITTTR, Chandigarh